АЛГОРИТМ ПОШУКУ МІСЦЬ З НИЗЬКОЮ ШВИДКІСТЮ ПЕРЕДАЧІ МОБІЛЬНИХ ДАНИХ ЧЕРЕЗ ПЕРЕНАВАНТАЖЕННЯ МЕРЕЖІ ДЛЯ ЗАСТОСУВАННЯ ПОВІТРЯНОЇ БАЗОВОЇ СТАНЦІЇГракова Д. О., бакалавр
КПІ ім. Ігоря Сікорського, м. Київ, УкраїнаПовітряна БС є одним із доступних методів покращення якості мобільного сигналу на короткий проміжок часу під час великого скупчення людей через деякі події або під час виходу з ладу однієї з базових стан-цій. Ця модель складається з picocell та радіореле, встановлених на дроні, а також включає в себе сервер, де будуть відбуватися головні розрахунки, для швидкої обробки інформації і для зменшення навантаження на обчислювальну систему дрона. Система із заданою періодичністю перераховує координати для динамічної зміни положення в залежності від забезпеченої якості сигналу. Даний алгоритм розроблений на основі теоретичних досліджень представлених в роботах [1, 2] та зосереджений на пошуку зони з поганим покриттям і розрахунку оптимальних коор-динат для відправки дронів, а також на спостереженні змін при введенні дрона в модель. Існує багато методів для рішення цієї задачі, але в даній роботі буде використаний метод різниці необхідної для комфортної ро-боти ємності та ємності, яку може забезпечити БС на даній території [2]. Цей спосіб є одним із найшвидших і простих методів, але потребує до-даткових даних від оператора.
Спочатку розраховується загальна ємність, необхідна кожній групі людей, які входять в сегменти карти. Сегмент — це результат розбиття території, яку треба обслужити, на певну кількість частин. Це зроблено з міркувань потреби в обслуговувані скупчення людей, такий спосіб спрощує обрахунки.
Одним з основних параметрів цього алгоритму є показник рівня сигналу RSSI, розрахований в кожній точці на карті, по формулі [3]:
де d — відстань від кожної точки карти до eNodeB, що обслуговує цю точку; d0 – контрольна відстань, в тестах d0 = 20; P0 — потужність сигналу пристрою, виміряна на одиничній відстані d0 від пристрою, дБм;
P0 = P − P_dist [дБм] — потужність передавача за вирахуванням втрат через втрати антени і шляху до виміряної точки; n — коефіцієнт втрати потужності сигналу при поширенні в середовищі, безрозмірна величина, для повітря n = 2; збільшується, якщо є перешкоди.
Цей параметр необхідний для подальших розрахунків, так як він показує загальну потужність, отриманий сигнал приймачем [4]. Під час моделювання було розраховано, яка базова станція обслуговує цю точку і відстань між ними. Потім на основі цього була створена карта рівня сигналу RSSI.
Крім того, для подальших розрахунків, потрібно визначити SINR [2]. Формула SINR в дБм:
SINR = S − IN [дБм]
де S — матриця RSSI в дБм, IN — сума завад і шуму у Ват.
Іншим важливим параметром для алгоритму є смуга пропускання Bw [4]. У цьому алгоритмі Bw був розділений на рівні частини для всіх користувачів, які належать до однієї і тієї ж зоні обслуговування, оскіль-ки мета полягала не в тому, щоб реалізувати повну модель мережі LTE, а в тому, щоб зосередитися на дослідженні методів пошуку зон з поганим обслуговуванням.
Моделі SINR і Bw необхідні для розрахунку ємності, з якої можна знайти місця з поганим рівнем сигналу. Для розрахунку ємності буде використана стандартна формула Шеннона [3]:
де Bw — це середня пропускна здатність матриці з кількістю користувачів в сегменті. SINR — відношення сигнал/шум + перешкоди.
Ємність моделі показана на рис. 1.
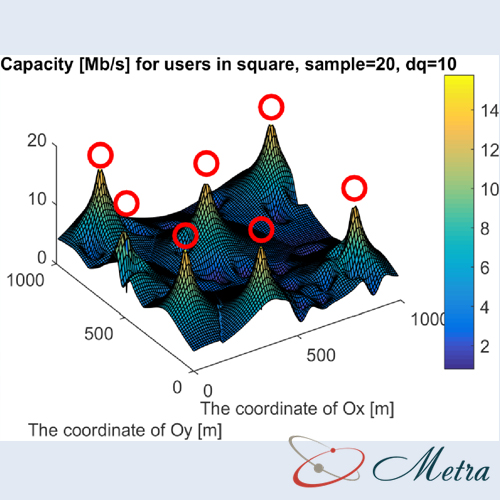 Рисунок 1. Модель пропускної здатності [Мбіт / с]
Рисунок 1. Модель пропускної здатності [Мбіт / с]Як можна побачити, в цієї моделі спостерігається спад рівня забезпеченої БС ємності, через скупчення людей в цих місцях.
За допомогою отриманих від оператора даних о користувачах, можна створити карту необхідного рівня сигналу та використати це при розрахунку різниці забезпеченого та потрібного сигналу.
Програма знаходить координати тих точок, в яких рівень зв’язку гірше, ніж в інших частинах карти.
Ця модель є лише невеликою частиною великого проекту, але знання та ідеї, які виникли в процесі розробки, можуть стати відмінною основою для подальшого розширення моделі. Результати показали, що дрони, які працюють по розрахованим координатам, дійсно змінюють картину рівня сигналу і можуть бути такими ж ефективними, як стаціо-нарний picocell, але в той же час працюють саме там, де це необхідно.
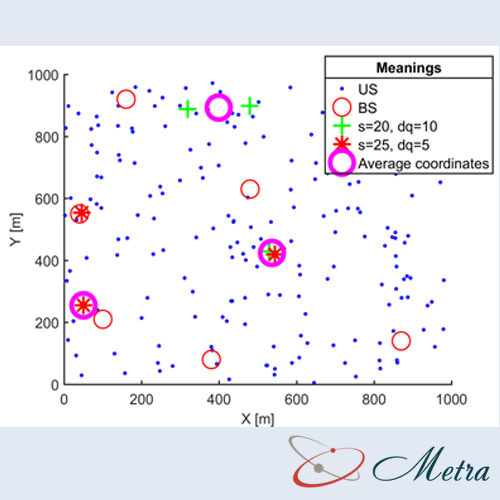 Рис. 2 – Результат алгоритму з отриманими координатами від різних тестів
Рис. 2 – Результат алгоритму з отриманими координатами від різних тестівНа рис. 2 можна побачити результат алгоритму при тестуванні різних вхідних даних. Знайдені координати відповідали місцям, де було потрібне додаткове обслуговування. Наступний крок — застосувати його на практиці з супутніми змінами в функціональності, оскільки ця мо-дель була створена для перевірки алгоритму пошуку областей з поганим покриттям.
Перелік посиланьСкрытый текст
1. Al-Hourani A. Modeling Air-to-Ground Path Loss for Low Altitude Platforms in Ur-ban Environments : дис. докт. техн. наук / Al-Hourani A., 2014.
2. Fontanilla Pérez de Tudela M. Positioning of Flying Base Stations for Optimization of Energy Consumption and Quality of Service in Mobile Networks / Fontanilla Pérez de Tudela M. – Praha, 2018. – 101 с.
3. Дьяконов С. В. Алгоритм поиска координат размещения ретранслятора связи на беспилотном летательном аппарате / С. В. Дьяконов, А. Ю. Сивов. // НАУКОВЕДЕНИЕ. – 2014. – С. 22.
4. Косолапова Т. Н. Построение мобильной телекоммуникационной сети стандарта CDMA "Сети и системы мобильной связи" / Косолапова Т. Н. – Алматы, 2008.


 Автор
Тема: Поиск низкой скорости при помощи дронов (Прочитано 2383 раз)
Автор
Тема: Поиск низкой скорости при помощи дронов (Прочитано 2383 раз)